


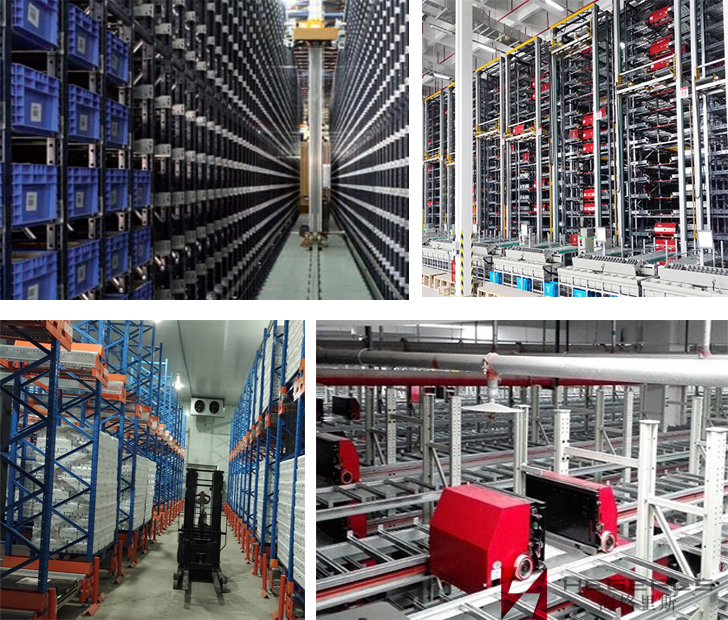
En la lastaj jaroj, kun la daŭra populareco de Interreto, elektronika komerco disvolviĝis rapide. La mendaj varoj de klientoj montras la karakterizaĵojn de multaj varioj, malmultaj aroj kaj mallonga liverperiodo, kio igas la stokan densecon de la bretoj en la loĝistika distribucentro de la provizanto senĉese pliboniĝas. La ofteco de materialoj enirantaj kaj elirante la magazenon pliiĝas. La nombro da malgrandaj partoj elektantaj pliiĝas tagon post tago. Pli kaj pli da loĝistikaj distribucentroj uzas la navedan aŭtomobilon bazitajn varojn al homoj elekta sistemo.
HEGERLS (Hebei Walker Metal Products Co., Ltd.
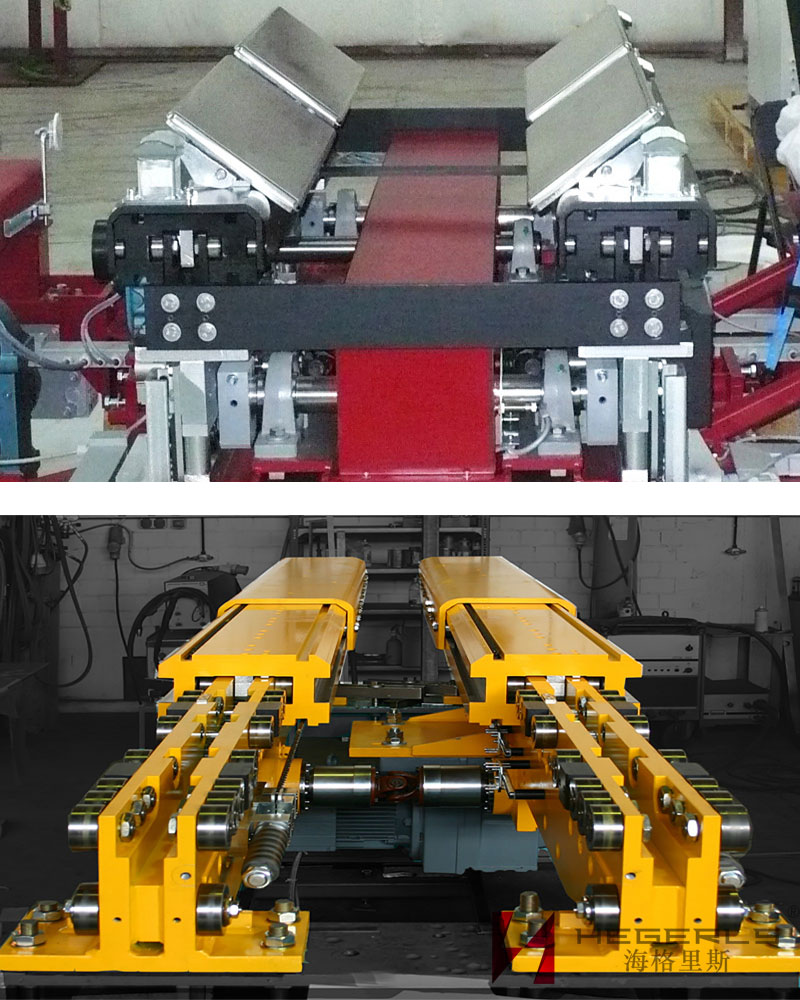
Krampaj teleskopaj forkoj estas vaste uzataj en aŭtomata stokado-ekipaĵo kiel stereo-magazenaj plurtavolaj navedaŭtoj, bretaj ujoj AGV, RGV kaj mini-ŝarĝo. La maksimuma pezo de la materiala skatolo tenita de HEGERLS povas atingi 50Kg. La krampa larĝo de la forkobrako povas esti ĝustigita arbitre ene de la gamo de 200 ~ 600mm. La maksimuma elekta vojaĝo estas 840 mm. La maksimuma operacia rapideco de la teleskopa forko estas 1.5m/s, kaj la akcelo estas 1.2m/s ²。 La operacia bruo estas kontrolita ene de 75dB, kio povas plenumi la postulojn de la plej multaj unuopaj kaj duoblaj etendaj rakoj. HEGERLS ankaŭ povas personecigi la plurtavolan navedan aŭtomobilan stereoskopan stokejon de la kroĉa teleskopa forkskatolo laŭ la specifaj postuloj de klientoj, kiel la kroĉa larĝo, elekta bato kaj aliaj parametroj.
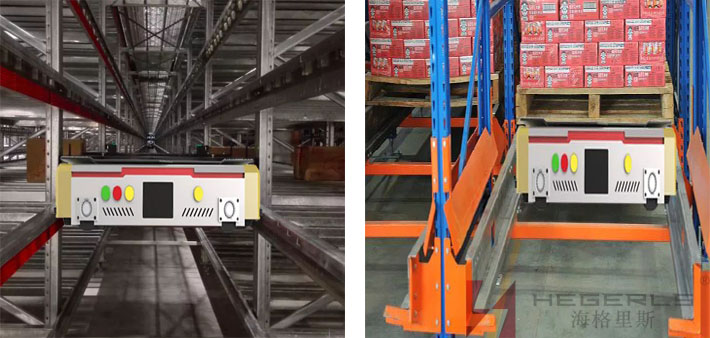
La partoj en la Hiygris HEGERLS ektenis teleskopan forkon-skatolon plurtavolan navedan aŭtomobilan stereomagazenon La teleskopa forko estas teleskopa mekanismo uzata en la stereofonia magazeno kaj la loĝistika aŭtomata stokado-sistemo por stokado aŭ translokigo de materialoj. Ĝi havas flekseblan dudirektan aŭtomatan ekspansion funkcion kaj precizan limfunkcion! Ĝi povas esti rekte muntita sur la stakilo, aŭ muntita sur fiksa levmekanismo, aŭ muntita sur movebla leva platformo. La stakilo trairas la vojon inter bretoj por aŭtomate aliri aŭ translokigi erojn! Ĝi povas esti konektita kun produktadlinia sistemo kaj entreprena administradsistemo. Ĝi uzas komputilan kaj strekkodan teknologion (kodigilo) por realigi informan inteligentan administradon kaj funkciadon!

Pri HEGERLS Klampa Teleskopa Forko
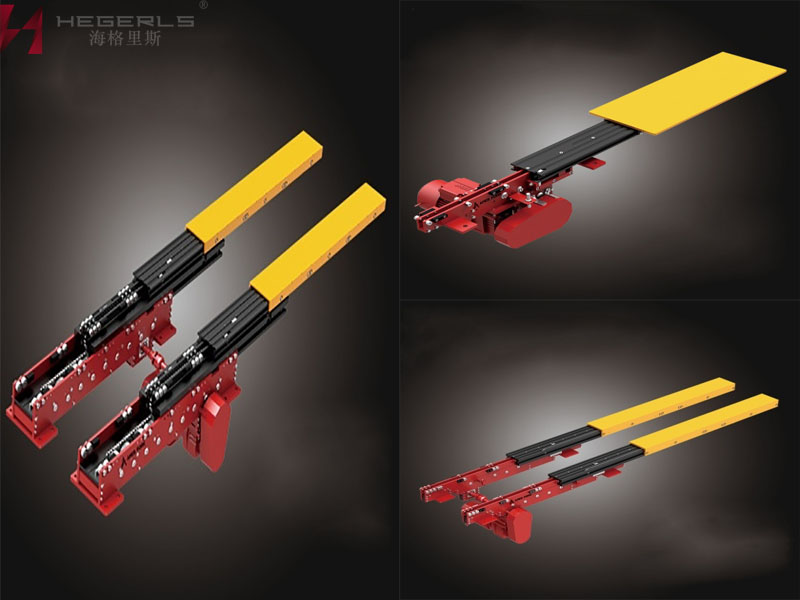
HEGERLS-teleskopa kroĉforko estas unika speco de forko en la serio de teleskopaj forkoj de stakiloj, nome, dudirekta aŭtomata teleskopa kroĉforko, ankaŭ konata kiel tena kroĉforko aŭ tena kroĉforko, forko aŭ forkforko. . Ĝi estas forko speciale uzata por translokado de malgrandaj rubujoj. Ĝi povas esti rekte kunvenita sur pluretaĝa elektanta AGV aŭ aliaj laborplatformoj, kun la ekspansio de la forkobrako kaj la kuplilo de la levilo (hoko), Kompletigu la aliron aŭ translokigon!
La kroĉforko de HEGERLS estas plejparte farita el aluminia alojo, havante malgrandan grandecon, malpezan pezon, rapidan kurantan rapidecon kaj glatan ekspansion. Samtempe, ĝi ankaŭ adoptas la principon de multmotora sinkronigo, rimarkante, ke la sama teleskopa forka mekanismo povas esti uzata por translokigi aŭ aliri skatolojn de malsamaj specifoj. Ĝi ne nur efike plibonigas la konservan efikecon, sed ankaŭ multe plibonigas la spacan utiligan indicon de stokado, precipe por alta intensa Inteligenta stokado!
HEGERLS-klipo sur teleskopa forkostrukturo
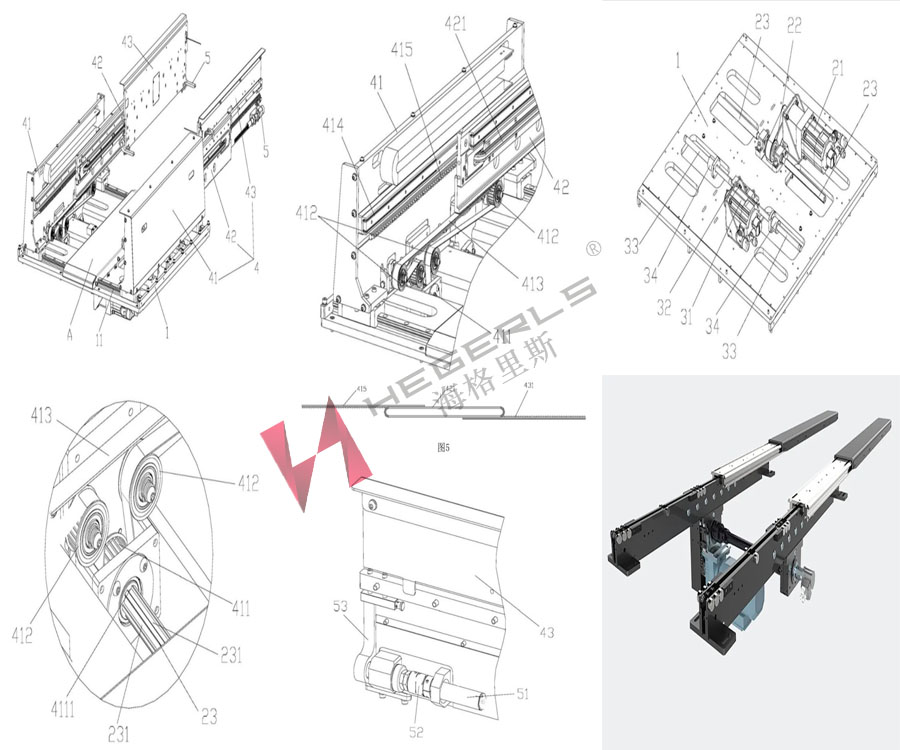
La strukturo de HEGERLS-gripforko povas esti dividita en profundan stokan lokon kaj malprofundan stokan lokon. Profunda stokejo estas stokejo kun du materialaj skatoloj, kaj malprofunda stokejo estas stokejo kun unu materiala skatolo. Tio estas, profunda stoka loko povas fiksi du materialajn skatolojn samtempe, dum malprofunda stokado povas nur krampi unu materialan skatolon samtempe. La diferenco inter la kroĉforko de HEGERLS kaj la ordinara dupleksa teleskopa forko estas, ke la fingro-tira forko ankoraŭ konsistas el tri forkkorpoj, nome, la interna forkkorpo, la meza forkkorpo kaj la ekstera forkkorpo, krom ke la antaŭa forkkorpo. havas unu plian tiran bastonon (hoko), kiu estas kongrua kun la gvidrelo (glitrelo), rulstango, sinkrona rado, sinkrona zono, flua stango, ŝovostango (hoko), jacking-ŝakto, raddrinkejo, veturadmotoro (servo) , ŝanĝa bastonmotoro La detekta instrumento kaj aliaj komponantoj formas kompletan teleskopan mekanismon, kiu kunlaboras kun la teleskopa forkobrako kaj la kluĉilo de la levilo (hoko) por kompletigi la aliron aŭ translokigon!
Funkcia principo de HEGERLS-klipo sur teleskopa forko
La forkbrako de la kroĉforko HEGERLS estas flanke staranta kaj ligita flanke per gvidrelo. Per kontrolo, la gvidrelo povas gliti tien kaj reen por ĝustigi la distancon inter la du forkbrakoj de la forko, por atingi la komunan uzon de forko por multspecifaj materialaj skatoloj! Kiam oni prenas materialojn, la forko etendiĝas al la materiala konserva pozicio, la retenhoko (levilo) aŭtomate malaltiĝas kaj blokas la finan vizaĝon de la kartono aŭ plasta skatolo, kaj tiam la forko retiriĝas, trenante la kartonon aŭ plastan skatolon al la mezo de la forko, kaj poste elmoviĝas inverse laŭ la gradpostuloj, la hoko (levilo) estas tirita malantaŭen, kaj la forko denove retiriĝas por plenumi la taskon preni aŭ translokiĝi! Kvankam la principo de la kroĉforko estas la sama kiel tiu de la ordinara teleskopa forko, la transmisiaj partoj, bieloj kaj aliaj komponantoj de la fingroforko estas tre malsamaj. Ĝi estas uzata por priskribi, ke la ĉenrado, ĉeno, ilaro, rako ktp estas ĉiuj anstataŭigitaj per sinkronaj radoj, sinkronaj zonoj ktp., dum la glitanta brako uzas gvidrelojn, kaj la forkkorpmaterialoj estas ĉiuj anstataŭigitaj per metalaj folioj. aŭ aluminiaj alojaj materialoj, do la pezo de la kroĉforko estas nur ĉirkaŭ 80kg.
Krome, oni devas rimarki, ke dum la desegno de la kroĉa tipo teleskopa forko, la grandeco de la densaj stokaj bretoj, la vertikala pozicio de la bretoj kun skatoloj, la trakonivelo kaj la grandeco de la skatoloj devas esti kombinitaj por determini la ĝeneralaj parametroj de la etendo forkoj (etenda forko movado, skatolo interspaco, forko larĝa, forko interna larĝo, forko alteco, ktp), por renkonti la bezonojn de ujoj sur la bretoj. Krampforko povas nur translokigi aŭ aliri la produktojn enpakitajn en kartonoj aŭ plastaj skatoloj efike, kaj ne povas translokigi neregulajn materialojn. Krome, la volumo kaj pezo de la transigita materiala skatolo ne devas esti tro grandaj, kaj la ŝarĝa pezo ne superu 100KG! La alteco de la krampoforko estas ĝenerale desegnita laŭ la alteco de la rubujo!
Pri HEGERLS Clip on Shuttle
La strukturo de HEGERLS-klipo sur navedo konsistas el navedkadro, naveda ĉasio, vojaĝanta mekanismo, malĉefa forko-etenda mekanismo, kolektanto, portanta plato kaj portanta platformo. La strukturo estas kiel sekvas:
Ĉiu navedkadro estas kutime fermita kavaĵo kunmetita de la ĉefkorpkrampoj sur same flankoj, la ŝelo kaj la interna nabkrampo, kaj estas respektive aranĝita ĉe ambaŭ finoj de la navedĉasio; La ŝelo estas provizita per supra kovrilo kiu povas esti malfermita kaj fermita tra turnoverporda ĉarniro; Panela dratrako estas aranĝita super la nabkrampo; La vojaĝanta mekanismo konsistas el veturrado, pasiva rado, DC-senbrosa motoro, reduktilo kaj konektanta ŝafto; Ambaŭ flankoj de la navedokadro ĉe unu fino de la navedoĉasio estas provizitaj per veturantaj radoj ligitaj per konektaj ŝaftoj, kaj ambaŭ flankoj de la navedokadro ĉe la alia fino de la navedoĉasio estas provizitaj per pasivaj radoj ligitaj per konektaj ŝaftoj; La DC-senbrosa motoro kunlaboras kun la reduktilo por movi la kondukradon kaj movi la pasivan radon; La kunliga ŝafto estas provizita per magneta kodilo, per kiu la komencaj kaj haltaj pozicioj de la navedo sur la rekta vojo estas akiritaj; Sekundara forka etendaĵmekanismo estas simetrie aranĝita sur la interna flanko de la navedaŭtokadro; La navedĉasio inter la sekundaraj forkecaj etendaĵmekanismoj estas provizita per portanta platformo por meti la kargokorbon; La fermita kavo de la kadro de la naveda aŭtomobilo estas respektive provizita per portanta plato, sur kiu sinsekve estas aranĝitaj veturplato, ĉefa kontrolplato de la vojaĝmekanismo kaj ĉefa kontrolplato de la fork-etenda mekanismo; La veturplato movas la vojaĝmekanismon por movi la navedon por kuri sur la rekta vojo. La ĉefa kontroltabulo de la vojaĝanta mekanismo kontrolas la kurantajn parametrojn kaj starthaltajn poziciojn de la navedo, kaj la ĉefa kontroltabulo de la fork-etenda mekanismo kontrolas la malĉefajn fork-etendan mekanismon por kapti kaj meti la korbon sur la breton; Kolekta aparato estas metita inter la navedovagono kaj la rekta trako, kiu estas ligita kun la elektrigita drato aranĝita ene de la rekta trako kaj uzata por provizi potencon por la navedovagono. La struktura trajto de la klipo sur inteligenta navedvagono por stokado ankaŭ kuŝas en tio, ke kaneloj estas fiksitaj ĉe la pozicioj kie la veturrado kaj la pasiva rado respektive kontaktas la konektan ŝafton, kaj elasta retenringo estas fiksita en la kanelo por formi la aksan. poziciigado de la mova rado kaj la pasiva rado. Duoblaj gvidradoj estas respektive metitaj ĉe la flanko de la navedoĉasio sub la veturrado kaj la pasiva rado, kaj inter la rekta trako kaj la navedoĉasio. La duoblaj gvidradoj formas la maldekstrajn kaj dekstrajn limojn kiam la veturrado kaj la pasiva rado kuras sur la rekta trako. La sekundara forko-etendmekanismo inkluzivas: la unua-nivela fork-etenda puŝplato, la dua-nivela fork-etendplato, la dua-nivela sinkrona puliomekanismo, la dua-nivela fork-etenda veturado-mekanismo, la fork-etenda motoro, alia reduktilo, kaj la veturiga ŝafto ; La ekstera flanko de la nabkrampo de la navedaŭtokadro estas provizita per unuafaza fork-etendaĵo-puŝplato; U-forma deglitejo estas aranĝita en la mezo de la unua fazo forko-puŝplato, kaj pluraj U-formaj deglitejo estas aranĝitaj je egalaj intervaloj en la U-forma deglitejo; Sekundara forkplato estas aranĝita ekster la U-forma glitejo; La sekundara forkoplato estas ligita kun pluraj U-formaj sulkaj pulioj tra rigliloj kaj nuksoj; La supraj finoj de la dua faza forka etendplato estas respektive provizitaj per ŝanĝforko, Dc planeda reduktilo-motoro kaj fotoelektra sensilo de ekstere al la interno; La fotoelektra sensilo estas uzata por akiri la pozicion signalon de la forko kaj sendi ĝin al la ĉefa kontrolo tabulo de la forko etendo mekanismo, kiu kontrolas la DC planedan reduktilo motoro movi la forkon por moviĝi horizontale aŭ vertikale; Sekundara sinkrona puliomekanismo estas respektive aranĝita sur la primara forko puŝanta plato kaj rekte sub kaj super la U-forma glitejo; La malĉefa sinkrona puliomekanismo estas konektita kun la sinkrona zono premante telero sur la malĉefa forko etendoplato; La forko-etenda motoro kaj alia reduktilo veturas la sekundaran forkon-etendan veturan mekanismon por moviĝi, kaj veturas la sekundaran forkon-etendan veturilan mekanismon sur la alia flanko por moviĝi tra la veturadŝafto, tiel ke la primara forkeca etendo-puŝplato movas kaj movas la malĉefajn. sinkrona pulio mekanismo movi, tiel pelante la malĉefa forko etendo telero movi. La du-etapa forko-etenda transmisiomekanismo konsistas el magneta kodilo, el sinkrona zono-pulio I, el sinkrona zono I, el streĉa rada aparato kaj el rako; Pulio de temporindulo 1 kaj tempozono 1 estas aranĝitaj sub la unuafaza forko-puŝplato; Unu flanko de la sinkrona zono-pulio I estas konektita kun la transdona ŝafto, kaj la alia flanko estas ligita kun la eligo-ŝakto de la alia reduktilo tra la ŝlosilvojo. Tendilaj radaj aparatoj estas respektive starigitaj ambaŭflanke de la alia reduktilo por helpa fiksado de la sinkrona zona pulio I kaj la sinkrona zono I; Rako estas aranĝita inter la unuafaza forko-puŝa plato kaj la sinkrona zono; La forkeca etendo-motoro kaj alia reduktilo veturas la sinkronan zonpulion I kaj la sinkronan zonon I por rotacii, kaj veturigas la sinkronan zonpulion II kaj la sinkronan zonon II sur la alia flanko por turni tra la transdona ŝafto. Samtempe, la rakoj ambaŭflanke veturas la respondan ĉefan forkecan etendon puŝplaton por atingi primaran forkan etendon. Kiam la malĉefa sinkrona zono-pulio-mekanismo moviĝas sinkrone kaj pelas la malĉefan forkon etendoplaton por moviĝi, la U-forma pulio ruliĝas en la U-forma glitejo, Faru la malĉefan forkecan etendoplaton realigi la malĉefan forkecan etendon. La streĉa rado-aparato inkluzivas: riglilon, alĝustigan krampon, duoblan nukson kaj streĉan radon; Streĉiga rado estas aranĝita sub la sinkrona zono I kaj ambaŭflanke de la alia reduktilo, kaj estas fiksita sur la ĉefkorpa krampo tra duobla nukso; Alĝustiga krampo estas aranĝita sub la duobla nukso tra la riglilo, kaj la pozicio de la alĝustiga krampo estas alĝustigita per la riglilo, tiel ke la alĝustiga krampo movas la duoblan nukson movi supren kaj malsupren, tiel ke la sinkrona zono mi povas konservi la streĉa stato sub la ago de la streĉa rado.
Kiel la navedobuso HEGERLS movos entreprenon profitojn?
Unue, la vojaĝmekanismo, forko etenda mekanismo kaj kadro, glita kontaktlinio kaj elektra aparato de la inteligenta naveda aŭto HEGERLS kun klipo sur stokado estas racie aranĝitaj, kiu plene uzas la spacon de la naveda aŭto, kaj povas adaptiĝi al la. aŭtomata stokado kaj reakiro de varoj de malsamaj specifoj kaj lokoj en la tridimensia magazeno, vastigante la aplikan kovradon de la naveda aŭto, kaj rapide kaj efike kompletigi serion da kontinuaj agoj de la naveda aŭto, kiel marŝado, forko etendo, plukado. supren kaj metante varojn, Ĝi realigas la rapidan kaj precizan stokadon de varoj, tiel multe plibonigante la operacian efikecon kaj aŭtomatigan teknologionivelon de aŭtomata magazeno, kaj reduktante la investkostojn de entreprenoj. Samtempe, ĝi estas simpla kaj malpeza en strukturo, alta en fidindeco, kaj facile konservebla. Ĝi povas anstataŭigi la tradician vojspililon, rimarkante la flekseblecon de la sistemo, kaj konformas al la evolua tendenco de elektronika komerca loĝistiko kaj stokada aŭtomatigo.
Due, en la vojaĝanta mekanismo de HEGERLS-inteligenta naveda aŭtomobilo, la konektaj ŝaftoj de veturantaj radoj kaj pasivaj radoj estas provizitaj per sulkoj, kaj la konektaj partoj de lagroj estas konektitaj per nova speco de elasta retenringo, rimarkante la aksan poziciiga efiko de konektado. ŝaftoj; Uzante la elastan retenringon por atingi la aksan poziciiga efiko, la produktada efikeco povas esti pliigita kaj la kosto povas esti ŝparita.
Trie: La inteligenta navedvagono de Higelis HEGERLS por tenado de stokado rimarkas, ke la kondukrado kaj la pasiva rado ĉiam moviĝas sur la rekta vojo sen deflankiĝado de la trako tra la duobla gvidradostrukturo. Ĉi tiu poziciiga strukturo estas pli stabila kaj fidinda.
Kvare, la malĉefa forka etendostrukturo adoptita de la HEGERLS-inteligenta pramovagono povas fari la forkan etendon distancon pli for kaj akiri pli da korboj ĉe malsamaj pozicioj; Samtempe, la principo de la malĉefa forka etendo-mekanismo estas simpla, kaj la kosto de dezajno kaj fabrikado estas malalta; La transdona parto adoptas la reĝimon de unuopa motoro + reduktilo + transdona ŝakto por ke la malĉefa forka etendo-mekanismo atingu la celon de sinkrona ekspansio kaj kuntiriĝo, kio ŝparas pli da kostoj, efike reduktas la bezonatan aranĝan spacon kaj reduktas la pezon de la naveda aŭto. .
Kvine, la inteligenta naveda aŭto Higelis HEGERLS adoptas novan tipon de streĉa rado-aparato, kiu povas rapide teni la sinkronan zonon streĉita kaj realigi la normalan laboron de la naveda aŭto. Plie, ĉi tiu streĉa rado-aparato estas facila por fari, oportuna por instali kaj rapide ĝustigebla, kio ŝparas koston, ŝparas spacon kaj plibonigas laboran efikecon.
Afiŝtempo: Dec-19-2022