



Estas diversaj specoj de stokado-bretoj en la magazeno, kaj la stokado kaj rehavigo metodoj estas plejparte dividitaj en la sekvaj kategorioj, inkluzive de manlibro stokado kaj rehavigo, ĉareleva stokado kaj rehavigo, kaj aŭtomata stokado kaj retrovo. Nuntempe multaj entreprenoj volas realigi aŭtomatan magazenan operacion, do ili volas uzi aŭtomatigitajn magazenajn bretojn. Ekzemple, kvardirekta aŭtorako estas speco de aŭtomatigita stokado. Kiel la kvardirekta navedo AGV eniras kaj eliras el la magazeno? La magazeno peza breta produktadfabriko Haigris analizis.

Kvardirekta navedstokejo
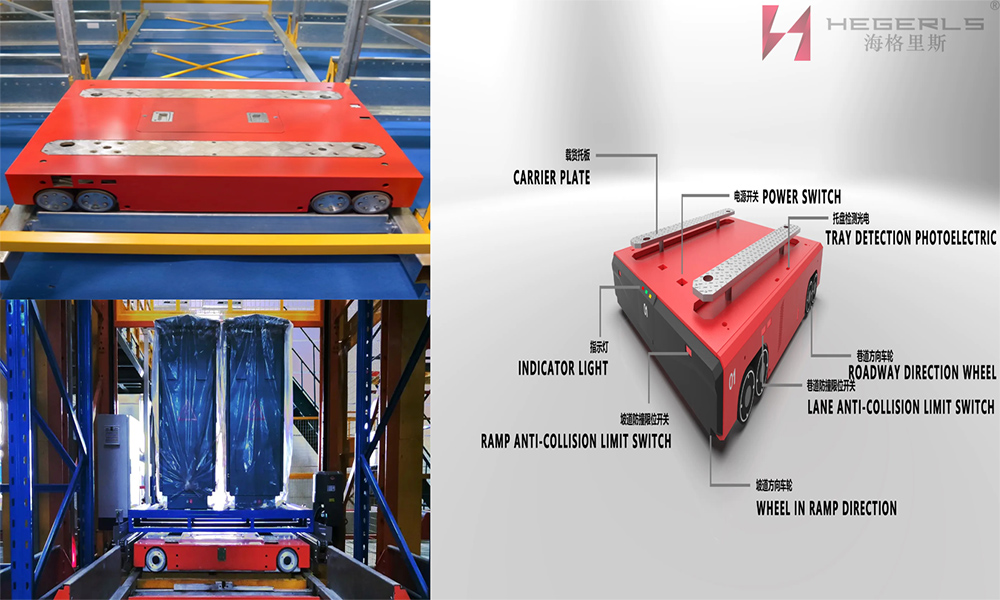
La kvardirekta navedvagono estas ekipita per 12 radoj, kiuj povas veturi en kvar direktoj laŭ la traka ebeno kaj libere atingi ajnan ŝarĝan spacon sur la magazena aviadilo. La kvardirekta navedo estas movita per la radoj ambaŭflanke samtempe por certigi, ke la aŭto-karoserio ne deflankiĝas dum funkciado, kaj ĝi povas kuri alterne laŭ la laŭlongaj kaj transversaj reloj sur la tridimensia breto.

Samtempe, la kvardirekta navedo estas inteligenta manipula aparato, kiu povas ne nur marŝi laŭlonge sed ankaŭ flanke. La kvardirekta navedo havas altan flekseblecon, povas ŝanĝi la funkciantan vojon laŭplaĉe, kaj ĝustigi la kapaciton de la sistemo pliigante aŭ malpliigante la nombron da navedaŭtoj. Se necese, la maksimuma valoro de la sistemo povas esti respondita per establado de la plana reĝimo de la laboranta veturila teamo, solvante la botelon de operacioj de eniro kaj eliro, kaj ankaŭ povas esti anstataŭigita unu kun la alia, Kiam navedo aŭ lifto malsukcesas, aliaj navedo aŭ liftoj povas esti ekspeditaj tra la ekspedsistemo por daŭri kompletigi la operacion sen tuŝi la sisteman kapaciton. Ĉi tiu aparato taŭgas por stokado de malalta fluo kaj alta denseco, kaj ankaŭ de stokado de alta fluo kaj alta denseco. Ĝi povas atingi pli grandan efikecon, koston kaj rimedojn.
Kiel la kvardirekta navedo AGV eniras kaj eliras el la magazeno?

1) Stoka metodo
a) La teknikistoj de la inteligenta kvardirekta navedo unue enŝaltas la inteligentan kvardirektan navedon kaj pretigas ĝin. La inteligenta kvardirekta navedo estas en standby;
b) Post konfirmi la elektan lokon de la inteligenta kvardirekta navedo, WCS planos la veturvojon laŭ la nuna loko kaj celloko de la inteligenta kvardirekta navedo, kaj tiam la personaro disdonos varojn al la inteligenta kvardirekta navedo. navedo tra WCS;
c) La inteligenta kvardirekta navedo komencas plenumi la liveran taskon laŭ la ricevita tasko-komando;
d) Sur la krucvojo, la inteligenta kvardirekta navedo vojaĝas en la movoreĝimo tra la reala distanco. Dum la veturprocezo, ĝi ade skanas la spurojn tra kiuj la malsupra parto de la veturilo-karoserio pasas. Ĉiun krucan pozicion ĝi preterpasas, ĝi juĝas kaj kalibras la distancon kiun ĝi vojaĝas skanante la spurojn. Kiam ĝi estas proksime al la celloko, ĝi fajne agordas la parkumadon per la flanka lasera sensilo por atingi precizan pozicion de la parkumada pozicio;
e) En la subkanalo, la inteligenta kvardirekta navedo povas skani la krucan trakon kaj flankan kalibran spegulreflekton, juĝi kaj kontroli la veturdistancon skanante la punktopozicion, kaj atingi precizan poziciiga kontrolo en la subkanalo por atingi la celon;
f) Kiam la inteligenta kvardirekta navedo alvenas al la elektita elekta pozicio, la paleto falas, la varoj estas metitaj sur la breton, kaj la WCS-sistemo estas sciigita pri la plenumo de la livera tasko;
g) La inteligenta kvardirekta navedo daŭre ricevas taskinstrukciojn aŭ revenas al la standby.
2) Livera metodo
a) La teknikistoj de la inteligenta kvardirekta navedo unue enŝaltas la inteligentan kvardirektan navedon kaj pretigas ĝin. La inteligenta kvardirekta navedo estas en standby;
b) Post konfirmi la elektan lokon de la inteligenta kvardirekta navedo, WCS planos la veturan itineron laŭ la nuna loko kaj celloko de la inteligenta kvardirekta navedo, kaj tiam la personaro sendos la elektan taskon al la inteligentaj kvar. -voja navedo tra WCS;
c) La inteligenta kvardirekta navedo komencas preni varojn laŭ la ricevita tasko-komando;
d) Sur la krucvojo, la inteligenta kvardirekta navedo vojaĝas en delokiĝa reĝimo tra la reala distanco. Dum la veturprocezo, ĝi ade skanas la spurojn tra kiuj la malsupra parto de la veturilo-karoserio pasas. Ĉiun krucan pozicion ĝi pasas, ĝi juĝas kaj kontrolas la distancon kiun ĝi vojaĝas skanante la spurojn. Alproksimiĝante al la celloko, ĝi fajne agordas la parkumadon per la flanka lasera sensilo por atingi precizan poziciiga kontrolo kaj parkado;
e) En la subkanalo, la inteligenta kvardirekta naveda aŭto skanas la transversan trakon kaj flankan kalibran spegulreflekton, juĝas kaj kalibras la veturdistancon skanante ĉi tiujn punktojn, kaj realigas la kontrolon de preciza poziciigado en la subkanalo por atingi la celon. .
Afiŝtempo: Sep-19-2022